基于CarSim的方程式赛车TCS算法开发
FSEC——中国大学生电动方程式大赛是一个全国性的大学生汽车赛事,参赛队伍自主设计、制造一台方程式赛车参加比赛。这里介绍一下我所隶属的车队共同开发的TCS——牵引力控制算法。
仿真平台
CarSim是一款强大的汽车仿真、自动驾驶仿真软件,具有真实的物理引擎,能够模拟各类路面、风等环境与各类发动机、变速箱、差速器乃至电动机、电池构成的车辆。使用它可以轻松的构建出一辆赛车模型,而不需要自己开发复杂的运动学模拟算法。
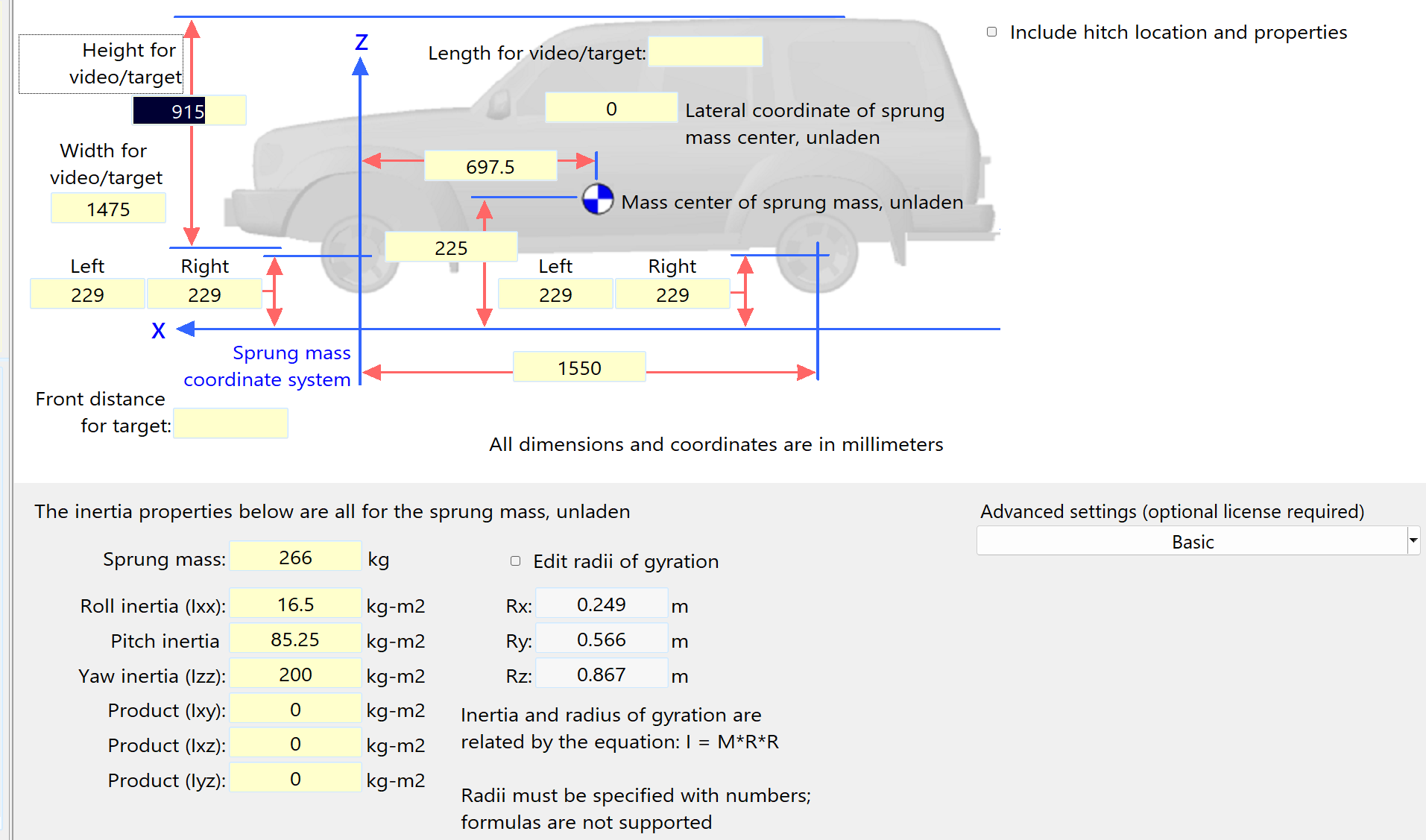
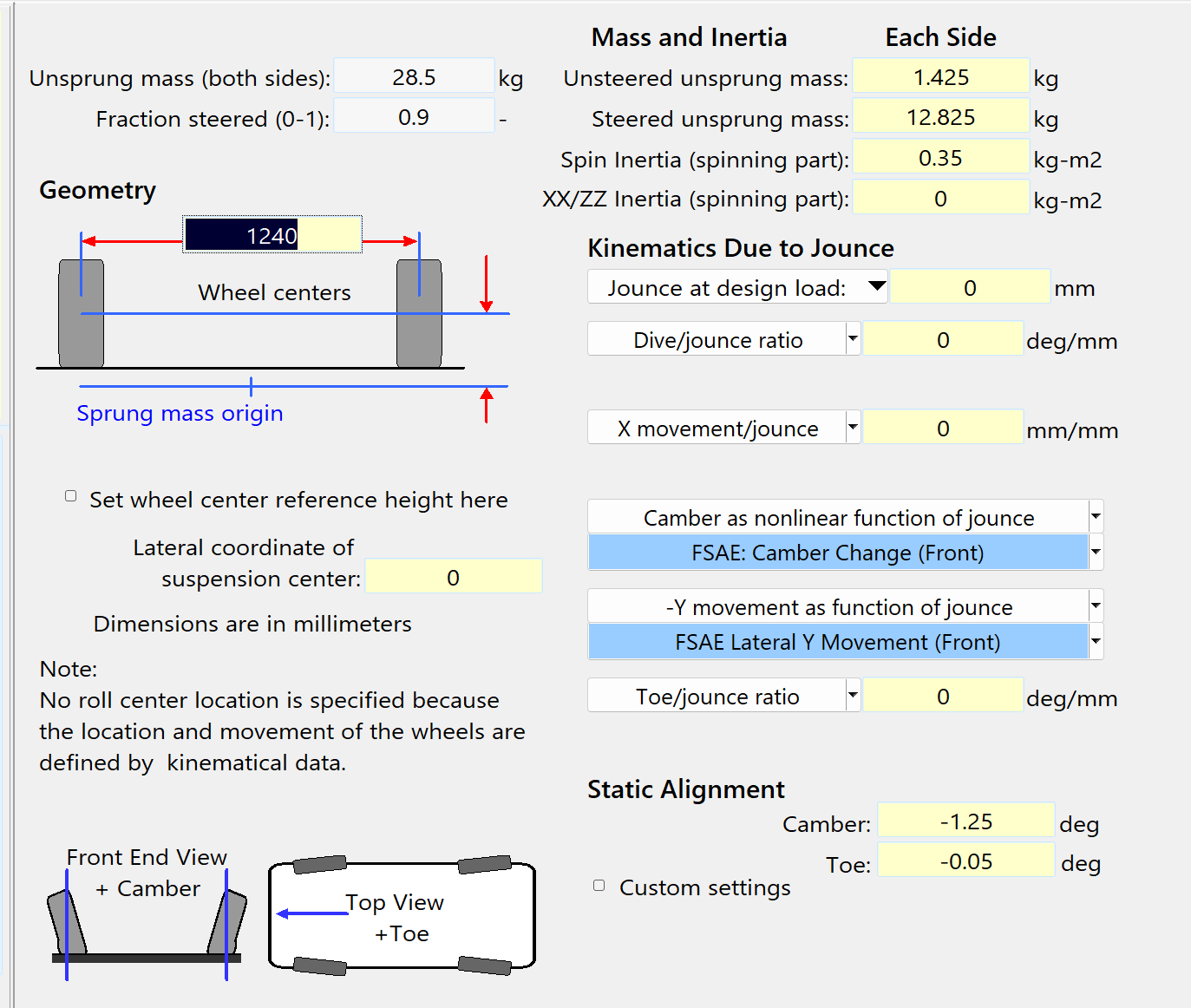
机械参数设置
车辆的机械参数,来自于FSAE所公开的一辆原型车模型,基本没有做改动。
电气参数设置
电气参数包括三大部分:动力总成、变速器、功率管理。其中动力总成包括电机、电池等。我基于CarSim自带的40kW电机系统开发,修改了一些设置和参数。我没有修改功率管理相关的东西,保持默认了。
-
动力总成
- 电池

按照我们车上的实际参数设置的。
2. 电机
按照电机手册设置即可
除了这两块,其他的类似于电池内阻、电池容量等参数我都没有设置,保持默认的。
-
变速器
按照我们的实际情况,选择了4.4传动比的变速器。
环境设置
默认的道路,摩擦系数约为0.9,这个摩擦力非常强大,即使全油门一脚踩下去,仿真里面的滑移率也不到0.1,所以为了显示出算法的效果,我把道路摩擦系数改成了0.5。
变量接口设置

输入变量叫做IMP_M_MOTOR_CMD,是电动机的输出扭矩指令。输入这个指令就可以改变电动机的输出扭矩

输出变量包括:四个轮子的转速,电机的输出扭矩,右后轮滑移率。其中滑移率数据我没用来做算法,只是验证一下通过轮速计算出来的滑移率是否正确。
控制算法
其实这个控制算法非常简单,各位大佬轻喷。
首先,考虑到程序运行的周期是20ms,整个算法也是以20ms的采样率运行的,但是仿真是以50us的步进运行的。
滑移率计算

该子模块输入前后轮的转速(m/s),计算出滑移率,随后通过一个离散传递函数后输出。该离散传递函数是一个低通滤波器。

记录一下这个低通滤波器是如何设计的。
首先,它必须是的形式,也就是的形式。在MATLAB里面,对应的是分子[α 0],分母[1 -(1-α)]
α越大,截止频率越高,α越小,截止频率越低。
其中为采样周期。
PID控制

PID输出的是扭矩补偿值,160是车手的踏板输入值,这样就可以补偿踏板给出的扭矩,实现牵引力控制的效果。PID参数如下:

调PID这一步是比较痛苦的。
调试思路
TCS开发过程遇到了不少问题
- 滑移率起不来
最开始的时候,滑移率一直是很低的数值,代表轮胎抓地力一直很强,这与实车测试结果并不相符。真车跑的时候,一脚油门下去一定打滑,但是仿真没有仿出来。最后只能把道路摩擦系数改为0.5 - 滑移率滞后
测试过程中,发现电机的扭矩和滑移率并不对应。电机的扭矩上升后,滑移率过了一段时间后才上升,有一个明显的延迟。这导致PID调节很困难。
后来拉出来CarSim计算出来的滑移率,发现并不存在这个问题。
最后定位到问题出在滤波器上。滤波器延迟太大,导致滑移率滞后。
测试结果


可以看到,摩擦系数0.5时,效果还是很好的。
基于CarSim的方程式赛车TCS算法开发
https://zhuwenguan.github.io/blog/2025/09/11/基于CarSim的方程式赛车TCS算法开发/