信号与系统知识点和例题梳理
整理了一小部分知识点,和我自己学的不太扎实的题型。
信号的描述及分类
确定信号与随机信号
连续信号与离散信号
连续
- 冲激信号δ(t)
信号大小一定要加括号
筛选特性:x(t)δ(t−t0)=x(t0)δ(t−t0),若结果含有x(t)δ(t),必须化简一步。
抽样特性:∫∞∞x(t)δ(t−t0)=x(t0)
展缩特性:δ(at)=∣a∣1δ(t)
- 阶跃信号u(t)
不考虑t=0的值(该处的函数值没有定义)
- 斜坡信号r(t)
离散
- 冲激信号δ[k]
注意在k=0时函数值为1,而不是正无穷。标的时候不能加括号。
δ[ak]=δ[k],这点与连续的冲激函数不同。
- 阶跃信号u[k]
k=0时,函数值确定为1。
- 斜坡信号r[k]
周期信号与非周期信号
连续
定义:∀x∈R,存在正实数T,使得x(t+nT)=x(t)成立。则T是x(t)的周期。
最小正实数T0称为基本周期
正弦信号x(t)=Asin(ω0t+θ)的周期为:
T0=∣ω0∣2π
离散
定义:∀k∈Z,存在正整数N,使得x[k+nN]=x[k]成立。则N是x[k]的周期。
最小正实数N0称为基本周期
离散正弦信号x[k]=sin(Ω0k)不一定是周期信号!
若2π∣Ω0∣=Nm为有理数(m和N都为不可约的正整数),则N为信号的周期。
虚指数序列ejΩ0k的周期计算方法相同。
例:求下列离散序列的周期
(1)x[k]=sin(5π)
解:
2π∣Ω0∣=101
则周期为10
(2)x[k]=sin(114π)
解:
2π∣Ω0∣=101
则周期为10
(3)以T=0.4抽样间隔对连续信号sin(t)抽样得到的离散信号
解:
sin(t)∣t=kT=sin(0.4k)
2π∣Ω0∣=5π1
为无理数,所以不是周期信号
能量信号和功率信号
归一化能量有限的称为能量信号
归一化功率有限的称为功率信号
例:判断下列信号是能量信号还是功率信号
(1)x(t)=Ae−t
解:归一化能量
∫−∞+∞∣Ae−t∣2=−2A2e−2t∣−∞+∞=∞
归一化功率
T→∞lim(2T1∫−TT∣Ae−t∣2)=T→∞lim(−2A2e−2t∣−TT)=∞
既不是能量信号,也不是功率信号
(2)x[k]=(54)k,k≥0
解:归一化能量
N→∞limk=−N∑N∣x[k]∣2=N→∞limk=0∑N(54)2k=1−0.641
归一化功率
N→∞lim2N+11k=−N∑N∣x[k]∣2=N→∞lim2N+11k=0∑N(54)2k
=N→∞lim2N+11−0.641=0
是能量信号,也是功率信号(能量信号一定是功率信号)
系统的描述及分类
系统的描述
- 输入输出描述
- 状态变量描述
系统的分类和判断
离散、连续
显而易见
线性非线性
- 均匀特性
若Tx(t)=y(t),则T(kx(t))=ky(t)
输入翻倍,输出也翻倍。
- 叠加特性
若T{x1(t)}=y1(t),T{x2(t)}=y2(t),则T{x1(t)+x2(t)}=y1(t)+y2(y)
输入相加,输出也相加。
- 综合表示
若T{x1(t)}=y1(t),T{x2(t)}=y2(t),则T{αx1(t)+βx2(t)}=αy1(t)+βy2(y)
输入线性组合,输出也线性组合。
- 零输入和零状态线性
含有初始状态的系统,若系统的响应可以分解为零输入和零状态,则需要分别求线性。只要两部分都线性,系统就线性。
若系统的响应不可以被分解为零输入和零状态(例如:y[k]=4y[0]⋅x[k]+3x[k]),则一定不线性,因为初始状态不会受输入影响,输入线性组合不会改变初始状态,也就无法使得输出线性组合。
例:判断该系统是否为线性系统
(1)y(t)=y(0)sin(2t)+∫0tx(τ)dτ
解:
yzs(t)=∫0tx(τ)dτ
yzi(t)=y(0)sin(2t)
Tzs{αx1(t)+βx2(t)}=∫0tαx1(τ)+βx2(τ)dτ
αyzs1(t)+βyzs2(t)=α∫0tx1(τ)+β∫0tx2(τ)dτ
输入线性组合的响应与输出线性组合相等,具有零状态线性
Tzi{αy1(0)+βy2(0)}=[αy1(0)+βy2(0)]sin(2t)
αyzi1(t)+βyzi2(t)=αy1(0)sin(2t)+βy2(0)sin(2t)
初始状态线性组合的响应与输出线性组合相等,具有零输入线性
综上,该系统具有线性
(2)y[k]=2y[0]+6x2[k]
解:零输入响应yzi[k]=2y[0],显然线性
yzs[k]=6x2[k]
Tzs{αx1[k]+βx2[k]}=6α2x12[k]+12αβx1[k]x2[k]+6β2x22[k]
αyzi1[k]+βyzi2[k]=6α2x12[k]+6β2x22[k]
二者并不相等,所以不具有零状态线性。
综上,该系统不具有线性
时变非时变
定义:非时变系统中,若x(t)产生的输出为y(t),则输入x(t−t0)产生的输出必为y(t−t0)。离散同理。
LTI系统
具有线性和非时变性的系统成为线性非时变系统(Linear Time-Invariant System)。
- 积分(求和)特性
输入积分,输出也积分。
- 微分(差分)特性
输入微分,输出也微分。
这些特性可以用来根据已知的激励和响应,求线性组合、微分积分的激励产生的响应

因果非因果
任意时刻的输出,都不超前于系统的输入。
例如:y[k]=2x[k+1],0时刻的输出由1时刻的输入决定,超前于输入,因此不是因果系统。
用单位冲激响应判断(只适用于LTI系统)


因果系统的 H(s) ,则其收敛域为 Re(s)>σ0(某个右半平面)。
因果离散系统,ROC 是以原点为中心某个圆周的外侧区域(即 ∣z∣>r0)
| 方法 |
连续系统 |
离散系统 |
| 冲激响应 |
h(t)=0, t<0 |
h[k]=0, k<0 |
| 复频域收敛域 |
s收敛域包括右半平面 |
z收敛域为某一圆外 |
稳定非稳定
任意有界的输入,其输出都是有界的。例如:∫−∞tx(τ)dτ,输入为阶跃信号时,t→∞时,输出是无穷,不满足条件。不具有BIBO稳定性。
单位冲激响应判断(只适用于LTI系统)


在复频域,连续时间LTI系统具有BIBO稳定性的充要条件是系统函数H(s)的收敛域包含s平面的虚轴,即收敛域Re(s)>σ0且σ0<0。
在复频域,离散时间LTI系统具有BIBO稳定性的充要条件是系统函数H(z)的收敛域包含z平面的单位圆,即∣z∣<r0且r0>1。
信号的基本运算
时域信号,所有的操作都是对自变量t或者x,而不是对括号内的整体。
先时移,再翻转/压缩/扩展
翻转
压缩/扩展
时移
例:
卷积
连续
x(t)∗h(t)=∫−∞+∞x(τ)h(t−τ)dτ
例:求x(t)∗h(t)
(1)x(t)=e−tu(t),h(t)=e−2tu(t−2)
后面整理的比较仓促。
傅里叶变换性质
| 序号 |
性质名称 |
时域表达x(t) |
频域表达X(jω) |
说明 |
| 1 |
线性性 |
ax1(t)+bx2(t) |
aX1(jω)+bX2(jω) |
傅里叶变换是线性运算 |
| 2 |
时移性质 |
x(t−t0) |
X(jω)e−jωt0 |
时间延迟对应频域相位变化 |
| 3 |
频移性质 |
x(t)ejω0t |
X(j(ω−ω0)) |
调制使频谱移动 |
| 4 |
缩放性质 |
x(at) |
a1X(jaω) |
时间伸缩对应频率反向伸缩 |
| 5 |
微分性质 |
dtndnx(t) |
(jω)nX(jω) |
导数变乘频率项 |
| 6 |
积分性质 |
∫−∞tx(τ)dτ |
jω1X(jω)+πX(0)δ(ω) |
时间积分对应频域除以jω |
| 7 |
卷积性质 |
x1(t)∗x2(t) |
X1(jω)⋅X2(jω) |
时域卷积对应频域乘法 |
| 8 |
乘积性质 |
x1(t)⋅x2(t) |
2π1X1(jω)∗X2(jω) |
时域乘法对应频域卷积 |
常见傅里叶变换对
| 原始信号 x(t) |
傅里叶变换 X(jω) |
| cos(ω0t) |
π[δ(ω−ω0)+δ(ω+ω0)] |
| sin(ω0t) |
jπ[δ(ω+ω0)−δ(ω−ω0)] |
| δ(t) |
1 |
| δ(t−t0) |
e−jωt0 |
| u(t) |
πδ(ω)+jω1 |
| cos(ω0t) |
π[δ(ω−ω0)+δ(ω+ω0)] |
| sin(ω0t) |
jπ[δ(ω+ω0)−δ(ω−ω0)] |
| ejω0t |
2πδ(ω−ω0) |
| e−atu(t), a>0 |
a+jω1 |
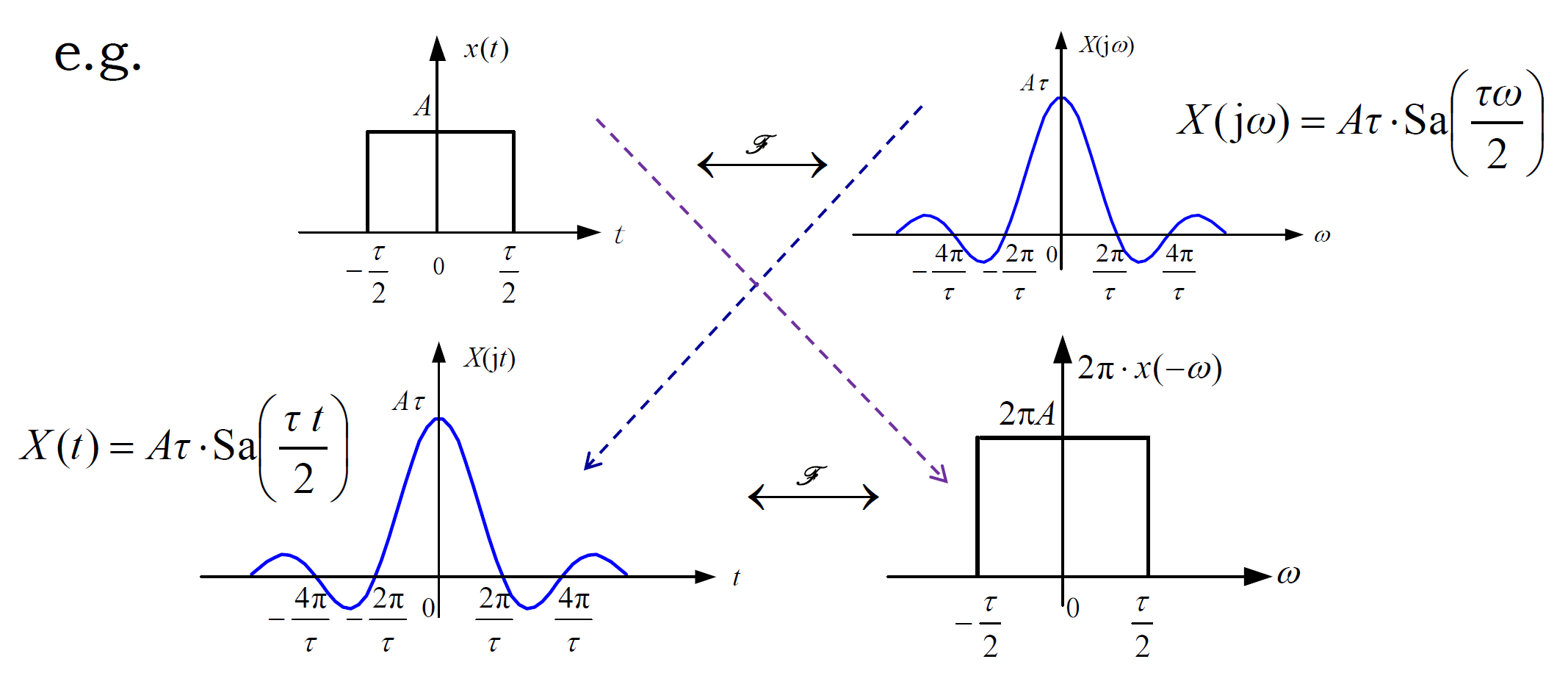
| x(t)=u(t+T/2)−u(t−T/2) |
T⋅Sa(2ωT) |
互易对称性
双边z变换


等比数列求和公式
离散时间傅里叶变换
初值定理终值定理
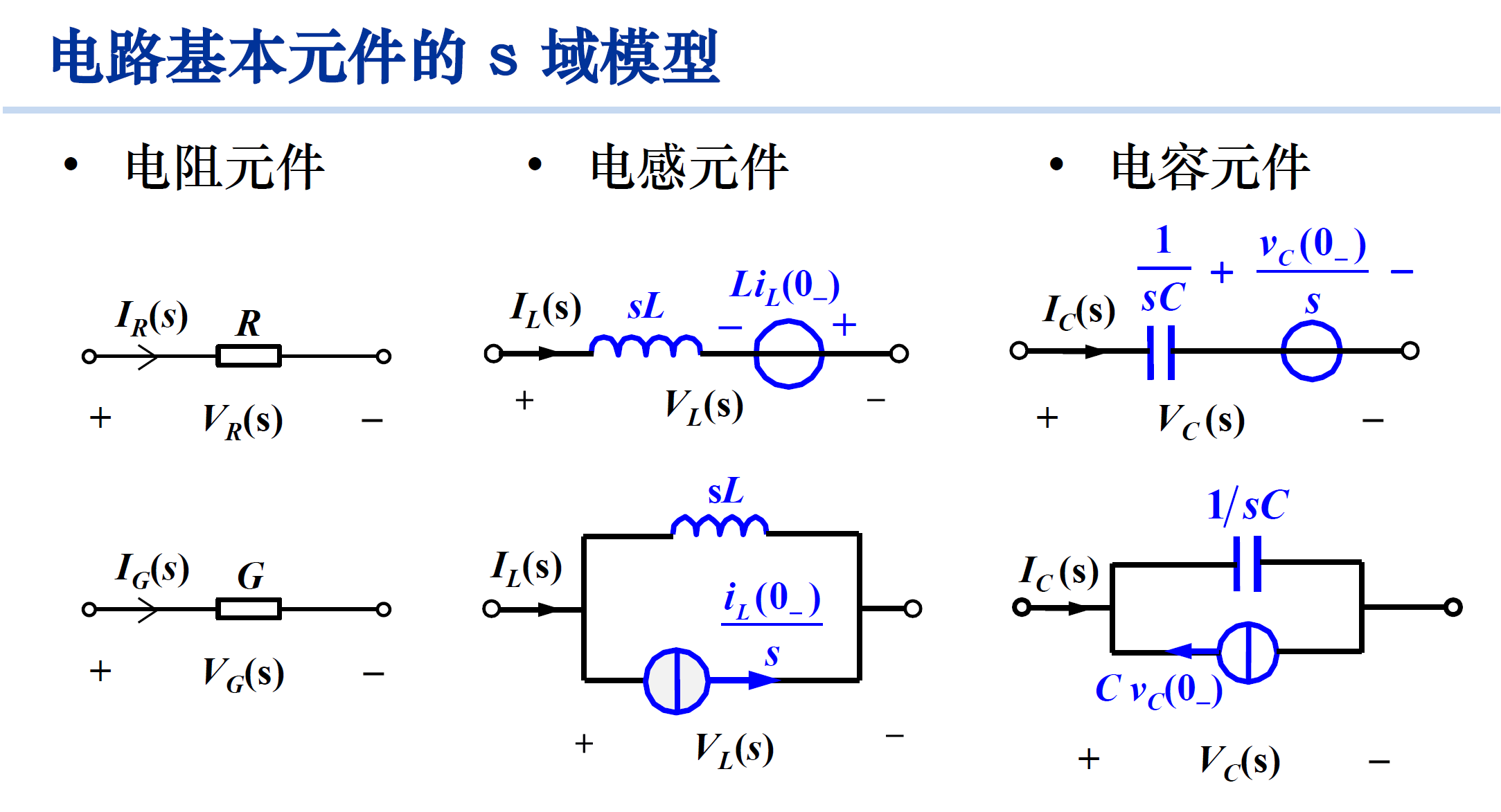
连续(s域)
x(0+)=s→+∞limsX(s)
x(+∞)=s→0limsX(s)
离散(z域)
x[0]=z→+∞limX(z)
x[+∞]=z→1lim(z−1)X(z)